ROBÓTICA
ROBÓTICA
¿QUÉ ES LA ROBÓTICA?:La robótica es una rama interdisciplinaria de la ingeniería, que se desprende de las ingenierías mecánica, electrónica, eléctrica, teoría del control y de las ciencias de la computación. Estudia el análisis, diseño, manufactura y aplicación de máquinas automáticas con cierto grado de inteligencia, capaces de realizar tareas que pueden reemplazar las actividades de un ser humano.
Un robot es una maquina programable que posee cierto grado de inteligencia, es capaz de ejecutar tareas de manera automática en función de las decisiones que toma basándose en la estructura de su programa.
Hasta aquí podemos concluir que la robótica es un área de la tecnología encargada del diseño, investigación y desarrollo de robots, que pueden ejecutar tareas específicas para las que han sido programados.
HISTORIA DE LA ROBÓTICA:
Por siglos el ser humano ha construido máquinas que imiten las partes del cuerpo humano. Los antiguos egipcios unieron brazos mecánicos a las estatuas de sus dioses. Estos brazos fueron operados por sacerdotes, quienes clamaban que el movimiento de estos era inspiración de sus dioses. Los griegos construyeron estatuas que operaban con sistemas hidráulicas, los cuales se utilizaban para fascinar a los adoradores de los templos.
Durante los siglos XVII y XVIII en Europa fueron construidos muñecos mecánicos muy ingeniosos que tenían algunas características de robots.
El desarrollo en la tecnología, donde se incluyen las poderosas computadoras electrónicas, los actuadores de control retroalimentados, transmisión de potencia a través de engranes, y la tecnología en sensores han contribuido a flexibilizar los mecanismos autómatas para desempeñar tareas dentro de la industria. Son varios los factores que intervienen para que se desarrollaran los primeros robots en la década de los 50’s. La investigación en inteligencia artificial desarrolló maneras de emular el procesamiento de información humana con computadoras electrónicas e inventó una variedad de mecanismos para probar sus teorías.
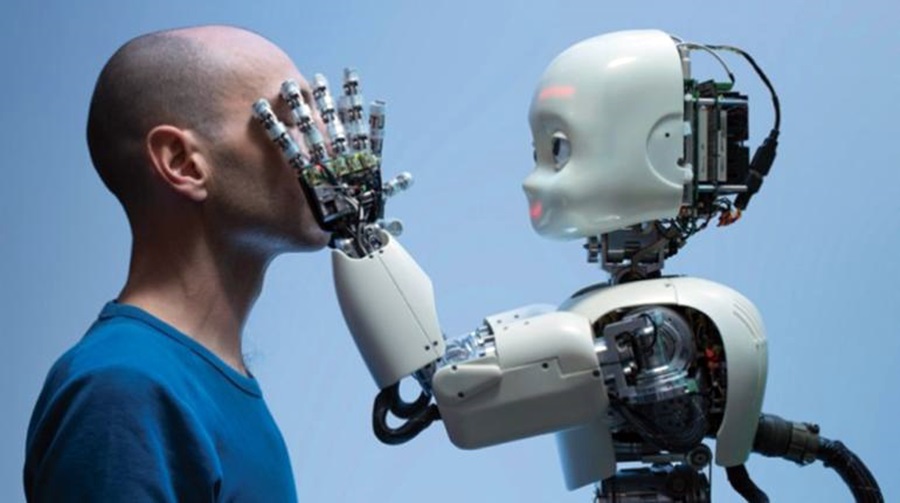
No obstante las limitaciones de las máquinas robóticas actuales, el concepto popular de un robot es que tiene una apariencia humana y que actúa como tal. Este concepto humanoide ha sido inspirado y estimulado por varias narraciones de ciencia ficción.

EXPONENTES
- 1942-Isaac Asimov:Crea una leyes de la robótica .
- 1946-Jhon Von Neumann:Primera presentación del concepto de programa almacenado y genérico reprogramación de computadoras.
- 1947-Shockley-Bardeer-Brattain :Inventaron el transistor.
- 1950-Alan Turing:Propone una prueba para determinar si una maquina ha ganado el poder de pensar por si misma.
- 1954-George Devol-Joe Engleberger:Diseñan el primer robot programable.
- 1981-Takeo Kanade:Contruye el brazo de accionamiento directo.
COMPONENTES
Leer más

Comentarios
Publicar un comentario